With the rapid iteration of embodied intelligence technology, humanoid robots are moving from laboratory demonstrations to large-scale commercial deployment. IDC data shows that global shipments of humanoid robots reached approximately 18,000 units in 2025, with Chinese manufacturers dominating the market share. Domestic market shipments are projected to climb to 62,500 units in 2026, marking the industry's official entry into the first year of mass production and commercialization. However, in the process of humanoid robots transitioning from "programmable execution devices" to "autonomous intelligent devices," precise obstacle avoidance in complex, unstructured environments remains a core indicator for measuring their intelligence level and a key technological hurdle restricting large-scale commercialization.
The core of precise obstacle avoidance is never simply "seeing" obstacles, but rather "understanding" environmental semantics in real time at the edge, predicting dynamic changes, and quickly making optimal passage decisions. This places near-extreme demands on the robot's edge computing power, multimodal data processing capabilities, real-time response speed, and power consumption control. The RK3588 NPU Embedded Core Board, with its mature edge AI inference capabilities, heterogeneous computing architecture, and industrial-grade stability, is becoming the core computing power foundation for humanoid robot edge intelligence, driving the robot's environmental perception capabilities to achieve a fundamental leap from "seeing" to "understanding."
Core Requirements and Technical Challenges of Humanoid Robot Obstacle Avoidance in Complex Environments
The application scenarios of humanoid robots have long since expanded beyond structured industrial production lines, extending to dynamic and unstructured complex environments such as homes, commercial buildings, outdoor parks, and industrial inspections. These scenarios lack pre-set routes, featuring randomly appearing static obstacles, dynamically moving pedestrians and equipment, and even complex terrain such as steps, slopes, and low obstacles, posing four core rigid requirements for obstacle avoidance systems.
First is the dual requirement of real-time edge processing and privacy security. Obstacle avoidance decisions in dynamic environments require millisecond-level end-to-end response latency. Cloud-based processing is affected by network fluctuations and transmission delays, making it unsuitable for real-time obstacle avoidance safety requirements. Therefore, full data processing and inference decisions must be completed on the robot's edge. Furthermore, the environmental images and spatial data collected by the robot often involve private information from homes and commercial locations. Localized processing enables a closed-loop data flow, eliminating the need for cross-network transmission and mitigating data leakage risks at the source, thus meeting privacy compliance requirements across multiple scenarios.
Secondly, there is the capability for multimodal perception data fusion processing. A single visual sensor cannot support accurate obstacle avoidance in complex environments. Mainstream humanoid robots employ multi-hardware fusion perception solutions, including binocular depth cameras, LiDAR, IMU inertial measurement units, and ultrasonic sensors. The obstacle avoidance system needs to simultaneously process multiple high-definition video streams, depth point cloud data, and posture sensor data, performing time synchronization, spatial calibration, and data fusion. This places extremely high demands on the multi-tasking and heterogeneous computing capabilities of the edge hardware.
Thirdly, there is the scene recognition capability from target detection to semantic understanding. Traditional obstacle avoidance solutions only achieve the basic logic of "obstacle recognition - triggering detour/stop," failing to address the diverse needs of complex scenarios. Humanoid robots, however, require semantic-level scene understanding: not only must they identify "what's in their field of vision," but they must also understand the attributes of objects and the logic of the scene—distinguishing between passable ground and impassable steps, between static obstacles and moving pedestrians, predicting the trajectory of dynamic targets, and even identifying traversable low obstacles and dangerous areas that must be avoided. This necessitates edge hardware capable of simultaneously running complex AI models for multiple tasks, including object detection, instance segmentation, keypoint detection, and motion prediction, achieving pixel-level environmental analysis.
Finally, there is the crucial balance between high computing power and low power consumption. Humanoid robots rely on battery power, and their overall battery life directly determines their practicality. Edge computing platforms typically need to provide continuous and stable AI inference and multi-tasking capabilities within a power consumption constraint of 5-8W, while ensuring long-term operational stability. This is a common industry challenge currently faced by edge computing chips.
Meanwhile, humanoid robot manufacturers still face numerous practical difficulties in implementing their solutions. The continuous iteration of edge AI models places higher demands on computing power; the fragmentation of application scenarios brings a large number of customized development needs, placing extremely high demands on the adaptability of hardware platforms and the completeness of software toolchains; the heterogeneous computing power collaboration of CPU+GPU+NPU requires developers to have profound low-level development capabilities, significantly increasing the development threshold; and the differentiated requirements for hardware stability and environmental adaptability in consumer and industrial scenarios further lengthen the product cycle from solution design to mass production.
KINGBROTHER Humanoid Robot Obstacle Avoidance System IPD Solution
Based on Rockchip's flagship RK3588 AIoT chip, the embedded core board is deeply optimized for edge-localized AI inference scenarios. Its hardware architecture and capability matrix perfectly match the core requirements of humanoid robot obstacle avoidance systems, making it the mainstream choice for edge computing power solutions for humanoid robots in China.
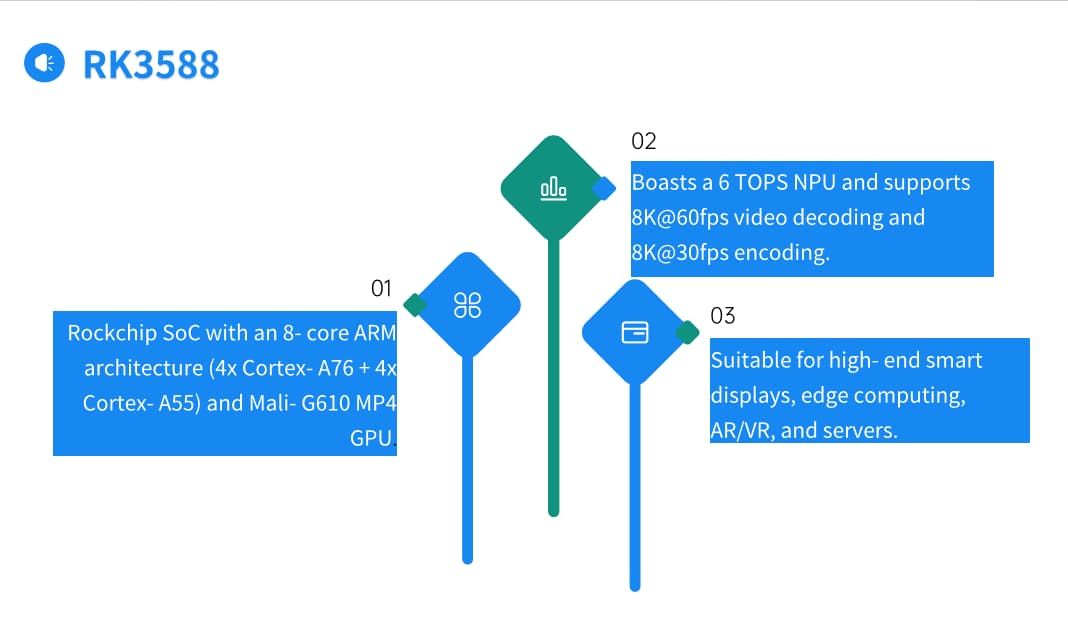
In terms of hardware specifications, the RK3588 adopts an advanced 8nm process, featuring an 8-core 64-bit CPU (4 Cortex-A76 cores @ 2.4GHz + 4 Cortex-A55 cores), an integrated Mali-G610 MP4 high-performance GPU, and a dedicated NPU computing unit, providing 6 TOPS INT8 fixed-point AI computing power. The core board undergoes industrial-grade hardware optimization, achieving 99.8% stability under 720 hours of high-load operation. It also possesses wide-temperature operation, vibration resistance, and electromagnetic interference resistance, perfectly adapting to the long-term continuous operation requirements of humanoid robots in various scenarios.
In practical applications, the RK3588 core board comprehensively addresses the technical pain points of humanoid robot obstacle avoidance systems from four core dimensions, driving environmental perception capabilities from "seeing" to "understanding."
Localized Real-Time AI Inference, Achieving Millisecond-Level Obstacle Avoidance Response
The core of obstacle avoidance safety in dynamic environments lies in the real-time nature of decision-making. The RK3588 core board's built-in dedicated NPU enables the entire process of preprocessing visual perception data, AI model inference, and obstacle avoidance decision-making on the edge, eliminating the need to upload raw image data to the cloud. End-to-end processing latency can be controlled within milliseconds, fully meeting the real-time requirements of dynamic obstacle avoidance and emergency response in unexpected scenarios, thus ensuring robot operational safety from a hardware perspective.
Simultaneously, the fully localized processing achieves closed-loop data operation. Environmental images and spatial data collected by the robot do not need to be transmitted across the public network, avoiding the decision-making delay risks caused by network fluctuations and fundamentally ensuring spatial privacy and data security in application scenarios. This perfectly adapts to the privacy compliance requirements of various scenarios such as residential homes, commercial offices, and industrial plants.
Heterogeneous Computing Collaboration Supports Multi-Modal Perception Data Fusion
The precise obstacle avoidance of humanoid robots is built upon multi-sensor data fusion for multi-dimensional environmental perception. The RK3588 core board implements heterogeneous computing power collaborative optimization of CPU+GPU+NPU, achieving optimal allocation of computing resources according to the characteristics of different types of computing tasks: the CPU is responsible for sensor data scheduling, time synchronization, and motion control command issuance; the GPU is responsible for encoding and decoding multiple high-definition video streams, image preprocessing, and depth data calculation; and the NPU focuses on accelerating AI model inference, achieving efficient utilization of computing resources.
This heterogeneous collaborative architecture can simultaneously support real-time processing of multiple high-definition visual streams and synchronous fusion of data from multiple sensors such as LiDAR and IMU. This allows the robot to not only "see" the planar image of the environment but also simultaneously acquire multi-dimensional environmental information such as depth, distance, spatial posture, and motion state, constructing a complete 3D spatial scene model and providing comprehensive data support for precise obstacle avoidance.
Multi-task AI Inference Capability, Achieving Semantic-Level Scene Understanding
The core leap from "seeing" to "understanding" lies in semantic-level cognition of the environment. The RK3588's NPU computing unit is deeply optimized for edge-side multi-task AI models, enabling efficient parallel execution of complex reasoning tasks such as object detection, semantic segmentation, instance segmentation, keypoint detection, and motion trajectory prediction. It can perform pixel-level analysis and semantic annotation of the environment within the robot's field of vision, accurately identifying the type, attributes, and motion state of obstacles, and even understanding the spatial structure and passage logic of the scene.
This semantic-level understanding capability completely changes the passive response logic of traditional obstacle avoidance solutions. The robot no longer simply "avoids/stops" obstacles, but can make optimal decisions based on scene semantics: identifying dynamic pedestrians and predicting their trajectories, planning avoidance routes in advance; distinguishing between passable slopes and impassable steps, identifying the traversability of low obstacles; and even adjusting obstacle avoidance strategies according to scene type, employing more conservative avoidance logic in densely populated commercial scenes and improving passage efficiency in open industrial scenes, significantly improving obstacle avoidance success rate and passage efficiency in complex, unstructured environments.
High Energy Efficiency Design: Balancing the Core Conflict Between Computing Power and Battery Life
Battery life is a core indicator of the practicality of humanoid robot products, and the power consumption control of the edge computing platform directly determines the overall battery life performance. The RK3588, using an advanced 8nm process, provides 6 TOPS of AI computing power and an 8-core high-performance CPU while achieving excellent energy efficiency control. Under typical operating conditions of humanoid robots, it stably controls the power consumption of the computing unit within the industry-standard range of 5-8W. This significantly reduces overall power consumption while ensuring sufficient AI inference performance, effectively extending the robot's battery life.
Meanwhile, the core board has undergone comprehensive industrial-grade reliability optimization. All core components use industrial-grade specifications, are adaptable to wide-temperature operating environments, and possess vibration and electromagnetic interference resistance capabilities. It can adapt to the operating environment requirements of robots in different scenarios such as home, commercial, and industrial settings, ensuring stable 24/7 continuous operation.
Full-Chain Technology Ecosystem and Customized IDH Services Lower the Barrier to Mass Production Deployment
The RK3588 platform covers multiple application scenarios including humanoid robots, industrial equipment, smart homes, and medical terminals. The fragmented nature of these scenarios leads to customized development needs, a core pain point for manufacturers during deployment. To address this industry challenge, we have built a complete technology ecosystem and a full-process IDH service system, providing customers with an integrated solution encompassing "computing platform + hardware manufacturing + software development support." This comprehensively lowers the development threshold for humanoid robot manufacturers and accelerates the entire process from solution design to mass production deployment.
At the technology platform level, we maintain deep technical cooperation with Rockchip, deeply integrating the original manufacturer's development resources and toolchain. We have completed underlying BSP optimization and AI model adaptation for humanoid robot obstacle avoidance scenarios. Simultaneously, our technology platform covers multiple computing platforms such as ARM, FPGA, and GPU. We can provide customized core board hardware solutions and computing power configurations based on customers' robot product positioning, sensor configuration, and obstacle avoidance solution requirements, meeting the full-scenario development needs from consumer-grade home service robots to industrial-grade inspection humanoid robots.
At the IDH service level, we possess highly customized hardware design, heterogeneous integration capabilities, and full-process technical support. Addressing the diverse needs of different clients, we offer a complete technical service, from core board schematic design, PCB layout, hardware adaptation, and low-level driver development to AI model porting and optimization, multi-channel perception fusion solution adaptation, and motion control interface integration. For humanoid robot obstacle avoidance scenarios, we have completed multiple mature mass-production reference solutions, including core functions such as multi-channel visual perception fusion, edge-side optimization of obstacle avoidance AI models, and multi-sensor time synchronization calibration. These solutions help clients significantly shorten development cycles, solve the challenges of heterogeneous programming and model porting, and quickly achieve mass production and deployment of products.
Implementation Value and Industry Prospects
Currently, our humanoid robot obstacle avoidance solution based on the RK3588 NPU embedded core board has been deployed at scale in multiple scenarios, including consumer-grade home service robots, commercial delivery robots, industrial inspection humanoid robots, and security patrol robots, bringing quantifiable core value to our clients.
In terms of product performance, semantic-level scene understanding significantly improves the robot's obstacle avoidance success rate in complex, unstructured environments, reducing issues such as stuttering, collisions, and unexpected shutdowns caused by obstacle avoidance failures, thus significantly improving product operational stability and user experience. Regarding development efficiency, mature core board solutions and full-process IDH services allow customers to focus on upper-layer application functions and product differentiation without investing heavily in underlying hardware and software development. This reduces product development cycles by an average of over 60%, significantly lowering R&D investment and mass production barriers. In terms of product competitiveness, excellent energy efficiency design ensures sufficient AI computing power while effectively controlling overall power consumption, extending robot runtime. Simultaneously, industrial-grade hardware design guarantees long-term product reliability, significantly enhancing the product's core market competitiveness.
As the humanoid robot industry officially enters its first year of large-scale commercialization, edge-side intelligent perception and decision-making capabilities will become the core of product differentiation. Moving from "seeing" the environment to "understanding" the scene is the core foundation for humanoid robots to achieve autonomous operation and complete complex tasks. The RK3588 NPU embedded core board, with its mature edge AI inference capabilities, heterogeneous computing architecture, excellent energy efficiency, and complete development ecosystem, is becoming the core computing power foundation for humanoid robot edge intelligence. In the future, we will continue to optimize core board solutions and customized services, working with industry partners to jointly promote the intelligent upgrade and large-scale implementation of the humanoid robot industry.